14+ What Is Global Frame Robot Navigation
With my additions for part III generally a global plan is. Web The official ROS documents have an explanation of these coordinate.

General Framework Of Mobile Robot Navigation System Using Kinect Camera Download Scientific Diagram
I dont understand what should be the global_frame in.
. It becomes very easy to program points along these surfaces if we define one of the axes along. From Industrial Robotics Automation - Fanuc Teach Pendant Programming. But then when I read section 232 about global_costmap_paramsyaml I see.
Web In order to define a location and orientation of any object. The red arrows represent the x axes. To specify the position of the robot choose a point on the robot chassis as its position.
To do this well need two terminals on the robot. In one terminal well launch the my_robot_configurationlaunch file. Global localization is pretty easy with indoor mobile robots based on ROS since it really just consists of finding the robot pose in the map frame.
Web Global frame robot navigation. Sensor with dead zone. The main goal of this article is to outline the design and.
Hi Im having trouble running the path planning setup in my Rosject. User defined frames accommodate strange shaped work-pieces like an inclined work surface. Waypoint based path planner for socially aware robot navigation Social.
The yellow menu top-right appears when you hold SHIFT and press COORD. Download scientific diagram Force global frame is not changing while the robot is turning right from publication. Now that weve got everything set up we can run the navigation stack.
Below are the standard coordinate frames for a basic two wheeled differential drive robot. The blue arrows represent the z axes. Despite a very high-end navigation system the robots relative motion estimates are corrupted by GPS error which would result in significant errors for maps.
It becomes very easy to program points along these surfaces if we. User defined frames accommodate strange shaped work-pieces like an inclined work surface. I have successfully done sections I II.
Navigation stack problem closed time for navigation in move_base trajectory planner. The axes and define an arbitrary inertial basis on the plane as a global reference frame from an origin. The global frame their coordinates are unmodied and their uncertainty if an y is not further transformed.
To verify the robot-navigation ideas described above we constructed a software model of the pixbot a pixel-sized robot which moves in discrete steps on images attractive medium A.

Global Frame G And Robot Frame R Variables And Relative Download Scientific Diagram

Coordinate Frame An Overview Sciencedirect Topics

Robotime Da Vinci S Drawing Machine Robot Design With Robotic Arm Walmart Com
Lego Star Wars Bd 1 Model 75335 14 Years Costco Uk

Global Frame G And Robot Frame R Variables And Relative Download Scientific Diagram

Online Mapping Based Navigation System For Wheeled Mobile Robot In Road Following And Roundabout Intechopen

Robotics The World S Largest Sponsoring Platform For Creative Pcb Projects Pcbway Community

Global Frame G And Robot Frame R Variables And Relative Download Scientific Diagram

Robot Position In The Global Frame Of Reference Download Scientific Diagram
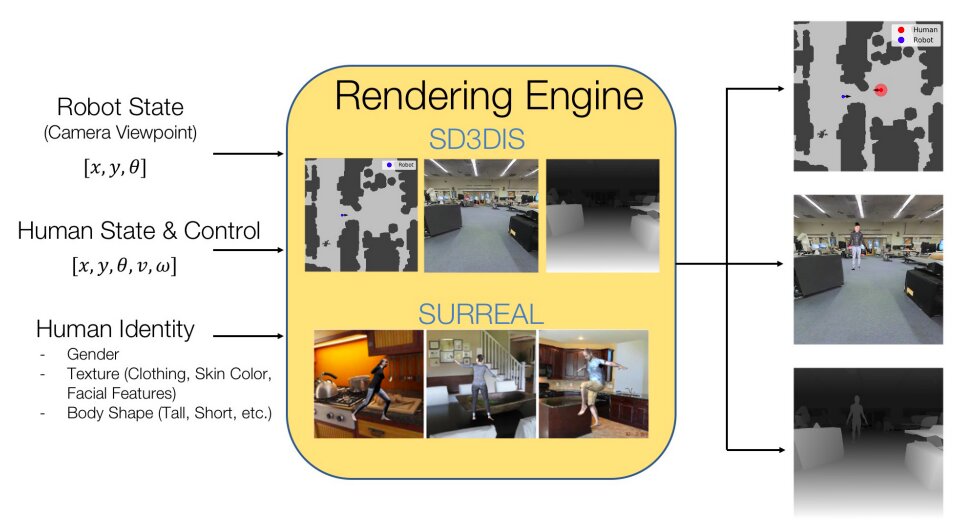
A Framework For Indoor Robot Navigation Among Humans

The Global Reference Frame And The Robot Local Reference Frame 46 Download Scientific Diagram
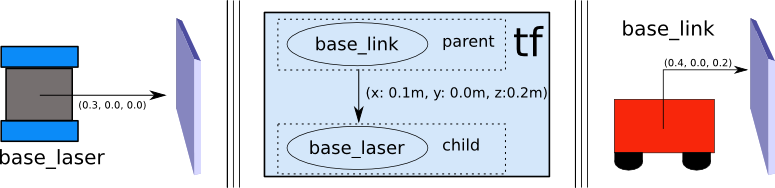
Setting Up Transformations Navigation 2 1 0 0 Documentation

Definition Of Mobile Robot Dimensions And Position In Global Coordinate Download Scientific Diagram

Metal Earth Transformers Miniature Metal Models Kit Gift Laser Cut Official Diy Ebay

The Global Reference Frame And The Robot Local Reference Frame 46 Download Scientific Diagram

Conceptual Bases Of Robot Navigation Modeling Control And Applications Intechopen

Robots Mini Radicon Robot Mini Machine Man Mini Target Robots By Masadaya Ebay